






O motor lineal intelixente controlado por forza é un sistema de motor lineal que combina tecnoloxía de control de forza e algoritmos intelixentes, capaces de axustar con precisión a forza de saída (empuxe ou tensión), logrando unha resposta dinámica elevada, axuste adaptativo e control de movemento intelixente. O motor lineal intelixente controlado por forza úsase amplamente en escenarios que requiren un control preciso da forza ou unha operación interactiva, como robots, fabricación de precisión, equipos médicos, etc.
|
Principio |
Baseado no motor lineal e combinado coa tecnoloxía de control de forza, o motor lineal intelixente de control de forza detecta a forza de saída en tempo real a través de sensores e transmite o sinal de retroalimentación de forza ao controlador. O controlador compara o valor da forza establecida co valor da forza de realimentación, axusta a corrente de entrada e outros parámetros e consegue un control preciso da forza de saída. O módulo de motor lineal TM-LM de TallMan Robotics utiliza un algoritmo de control híbrido de posición de forza, un algoritmo de control de forza constante, etc. para conseguir un control preciso da forza. |
|
Características estruturais |
Xeralmente composto por un corpo de motor lineal, sensor de forza, controlador, etc. O motor lineal xera forza motriz de movemento lineal; Medición en tempo real da forza de saída mediante sensores de forza, normalmente incluíndo galgas extensométricas, sensores piezoeléctricos, etc. O controlador é o compoñente principal responsable de procesar os sinais de retroalimentación da forza e emitir ordes de control. Para mellorar o rendemento e a integración, algúns motores lineais intelixentes controlados por forza adoptan un deseño integrado de control de accionamento, que integra o controlador e o controlador, reduce o volume e o cableado e mellora a estabilidade e fiabilidade do sistema. |
|
Vantaxes de rendemento |
1). Alta precisión de control de forza: pode acadar unha alta precisión de control de forza. Por exemplo, despois de engadir a función de control da forza de precisión ao módulo de motor lineal intelixente TM-LM, a precisión do control da forza de empuxe pode alcanzar ± 0,01 N. Velocidade de resposta rápida: capaz de responder rapidamente aos cambios de forza, axustar a forza de saída en tempo real e adaptarse aos requisitos de control dinámico da forza. Debido á ausencia dun mecanismo de transmisión intermedio, a inercia mecánica e a histérese redúcense, mellorando a velocidade de resposta e a sensibilidade do sistema. 2).Alta precisión de posicionamento: ademais da alta precisión de control da forza, a precisión de posicionamento tamén é excelente. Algúns produtos teñen unha precisión de posicionamento repetida de ± 0,001 mm, que poden cumprir os requisitos de posicionamento de alta-precisión e control de forza. 3).Modo de control flexible: admite varios modos de control, como o control híbrido de posición da forza, o control de forza constante, etc. Pódense seleccionar métodos de control axeitados segundo os diferentes requisitos da aplicación para conseguir un control preciso da forza e un control de posición. |
O motor lineal intelixente controlado por forza utiliza sensores de forza e control intelixente non só para posicionar con precisión o motor lineal, senón tamén para lograr operacións de control de forza dinámica e adaptativa elevadas. Ten un valor significativo en-fabricación de alta gama, robótica médica, probas de investigación científica e outros campos. No futuro, co desenvolvemento da IA e da tecnoloxía de detección, o seu ámbito de aplicación ampliarase aínda máis.
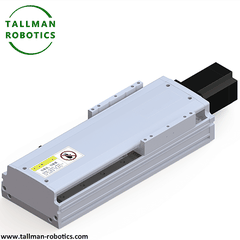
Aquí presentamos o motor lineal, modelo TML170-CR para ambientes limpos, coa seguinte folla de datos:
Podes ver máis proxectos ou visitar a nosa galería de vídeos en Youtube: https://www.youtube.com/@tallmanrobotics











O motor lineal intelixente controlado por forza, co seu control de forza de alta-precisión, resposta rápida e características de axuste flexible, xoga un papel fundamental en escenarios que requiren un control preciso da forza e da posición, e úsase amplamente en múltiples campos, como a fabricación de precisión, semicondutores electrónicos, saúde médica e experimentos de investigación científica. A seguinte é unha explicación detallada de escenarios de aplicación específicos:
1. Fabricación de produtos electrónicos e de semicondutores
A industria electrónica ten requisitos de precisión extremadamente altos para a montaxe e probas. Os motores lineais intelixentes controlados por forza poden evitar danos aos compoñentes causados pola forza excesiva, ao tempo que garanten un funcionamento consistente.
|
Embalaxe e probas de chip |
Durante o proceso de unión do fío, é necesario controlar con precisión a forza de contacto entre o fío de soldadura e os pinos do chip (xeralmente dentro de ± 0,1 N) para evitar danos no chip ou un mal contacto; Durante a proba do chip, o control da forza de contacto entre a sonda e as unións de soldadura do chip pode evitar que a sonda se dobra ou se rompa. |
|
Montaxe da placa PCB |
Controla a forza de colocación de compoñentes pequenos, como resistencias e capacitores durante os procesos SMT e{0}}conecte para evitar que se desprendan os compoñentes ou se danen as almofadas; No proceso de laminación de placas de circuíto flexibles (FPC), úsase un control de forza constante para garantir unha adhesión uniforme e evitar engurras ou fendas. |
|
Fabricación de pantallas de visualización |
Durante a montaxe de pantallas LCD ou OLED e módulos de retroiluminación, controle a forza de presión para evitar que o substrato de vidro se rompa; Durante o proceso de unión dos sensores da pantalla táctil, a presión axústase a través da retroalimentación da forza para garantir unha condutividade estable da capa de detección. |
2. Montaxe de precisión de produtos 3C
Os produtos 3C (teléfonos móbiles, ordenadores, dispositivos intelixentes) teñen compoñentes pequenos e fráxiles, e a tecnoloxía de control de forza pode mellorar a eficiencia e o rendemento da montaxe.
|
Montaxe do teléfono móbil |
A presión do módulo da cámara e da tapa da batería require un control da presión para evitar a deformación da carcasa ou danos nos compoñentes internos; Na montaxe de rañuras e botóns para tarxetas SIM, utilízase a retroalimentación de forza para determinar se están instalados correctamente, evitando apretar ou afrouxar demasiado. |
|
Inserción e retirada do conector |
Durante o proceso de inserción e eliminación de interfaces USB e conectores de cinta, a forza de inserción e eliminación debe controlarse con precisión (como a forza de inserción e eliminación de Micro USB normalmente require 5-30 N) para evitar a flexión do pin ou o desgaste da interface e para determinar se o conxunto está cualificado mediante curvas de forza. |
|
Dispositivos que se poden levar como reloxos/auriculares |
A montaxe de microengrenaxes e baterías require un control de forza en milinewtons (mN) para evitar a deformación dos compoñentes de precisión; Ao apertar os parafusos de conexión entre a correa do reloxo e a caixa do reloxo, utilízase unha retroalimentación de forza para evitar que se deslice ou se rompa. |
3. Equipos Médicos e Bioenxeñaría
O control da forza no campo médico está directamente relacionado coa seguridade operativa e a precisión experimental, e os motores controlados por forza poden lograr movementos mínimamente invasivos e precisos.
|
Robot cirúrxico mínimamente invasivo |
Na cirurxía laparoscópica, cando os instrumentos (como pinzas, tesoiras) entran en contacto co tecido, a forza de suxeición (xeralmente<1N) is adjusted in real time through force feedback to avoid damaging blood vessels or organs; During orthopedic surgery, pressure should be controlled to prevent bone fractures during bone drilling or screw implantation. |
|
Desenvolvemento de fármacos e experimentos biolóxicos |
No funcionamento do chip microfluídico, controle a forza de inxección ou extracción de líquidos traza (nivel μ L) para evitar a ruptura da canle de chip; No cultivo celular, a captura e presión das células (como os experimentos de mecánica celular asistidos por microscopía de forza atómica) requiren o control da forza dos nanonewtons (nN) para evitar a morte celular. |
|
Equipos de rehabilitación |
O módulo de adestramento das extremidades do robot de rehabilitación detecta o estado da forza do paciente mediante a retroalimentación da forza, axusta a forza auxiliar en tempo real e evita o dano muscular causado pola tracción excesiva. |
4. Probas de precisión e control de calidade
No proceso de proba do produto, o motor controlado por forza pode simular o estado da forza no escenario de uso ou xulgar o rendemento do produto mediante a análise da curva de forza.
|
Ensaios de mecánica de materiais |
Cando se realizan probas de tracción e flexión en materiais como chapas metálicas, películas plásticas e fibras, a velocidade e magnitude da forza de carga contrólanse con precisión (como axustable continuamente de 0,1 N a 100 N) para obter parámetros como o límite de fluencia e o módulo elástico do material. |
|
Proba de vida do botón/interruptor |
Simula a forza dos usuarios que presionan os botóns do teléfono, os teclados e os botóns do coche (normalmente 1-5N) e determina a durabilidade do produto mediante cambios nos valores de forza durante decenas de miles de ciclos de probas. |
|
Probas de rendemento de selado |
Realice probas de presión nos aneis de selado de vasos de auga e recipientes a presión, controle a forza de compresión e monitoree os cambios de forza para determinar se hai fugas (a diminución anormal da forza pode indicar un fallo do selado). |
5. Investigación e Equipamento Especial
En investigacións de-punta ou ambientes especiais, os motores lineais intelixentes controlados por forza proporcionan unha saída de forza estable para experimentos de alta-precisión.
|
Equipos experimentais espaciais |
control preciso das forzas que actúan sobre mostras experimentais (como o crecemento de cristais e a soldadura de materiais) en simulacións terrestres de naves espaciais ou ambientes de microgravidade, eliminando as interferencias gravitatorias. |
|
Plataforma operativa de nivel nano |
Nos instrumentos de microscopía con sonda de varrido (SPM) e nanoindentación, a forza de contacto entre a sonda e a superficie da mostra está controlada por un motor controlado por forza (ata μ N ou mesmo nivel nN), logrando a observación da morfoloxía da superficie a nivel atómico ou a proba de dureza do material. |
|
Funcionamento asistido por robot |
Cando se ensamblan instrumentos de precisión co efector final dun robot colaborativo (como unha pinza), conséguese un "control conforme" mediante a retroalimentación da forza para adaptarse ás pequenas desviacións de posición da peza e evitar colisións ríxidas. |
O valor fundamental dos motores lineais intelixentes controlados por forza reside no control preciso e coordinado da forza e da posición. Os seus escenarios de aplicación requiren un equilibrio entre "magnitude da forza" e "precisión operativa", especialmente axeitado para escenarios que requiren "sensibilidade á forza", "susceptibilidade a danos" e "alta consistencia". Co desenvolvemento da automatización industrial cara á "flexibilidade" e a "intelixencia", o seu ámbito de aplicación está en constante expansión, como campos emerxentes como a soldadura de electrodos de baterías de novas enerxías e o apilamiento de módulos fotovoltaicos.
Etiquetas en quente: motor lineal intelixente controlado por forza, fabricantes, provedores e fábrica de motores lineais intelixentes controlados por forza de China

