





A Unidade de Actuación de Correa Robótica é un dispositivo de transmisión de correa deseñado especificamente para as articulacións ou membros do robot. Consegue un control de movemento preciso e lixeiro mediante a transmisión flexible de correas síncronas, equilibrando a transmisión de potencia e a flexibilidade estrutural. A Unidade de Actuación de Cinto Robótico úsase amplamente en campos como os robots colaborativos e os robots biomiméticos que son sensibles ao peso e á velocidade de resposta.
A Unidade de Actuación de Correa Robótica é un dispositivo de transmisión modular deseñado especificamente para as articulacións do robot ou o movemento lineal, que consegue a transmisión de potencia e o control do movemento mediante a transmisión de correa síncrona de alta-precisión. As súas características principais son lixeiras (un 40 % máis lixeira que a redución de marchas), baixa reacción (<1 arc minute), and high response (bandwidth>100 Hz), moi utilizado en robots colaborativos, robots SCARA, robots Delta e outros escenarios que requiren un alto rendemento dinámico.
Oprincipio de funcionamentodeUnidade de Actuación de Cinto Robóticobaséase na transmisión de malla flexible:
a potencia de rotación do motor transmítese á correa síncrona a través da polea activa, e a correa acciona a polea conducida a través da malla dentada, transmitindo a potencia ás articulacións do robot ou ao extremo de execución; Ao utilizar as características flexibles da correa, pódese conseguir unha transmisión non coaxial ou unha conexión múltiple. Ao mesmo tempo, controlando a velocidade do motor e a dirección, pódese axustar o ángulo de movemento, a velocidade e a forza das extremidades do robot. Algunhas unidades están integradas con sensores de par para conseguir o control de retroalimentación da forza.
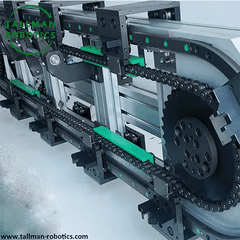
Estruturalmente,Unidade de Actuación de Cinto Robóticonormalmente consta de tres partes fundamentais:
un módulo de accionamento (micro servomotor e reductor, que proporciona potencia de saída adaptada ao robot); Compoñentes de transmisión (correas síncronas de alta-precisión, poleas e mecanismos de tensión, con correas feitas na súa maioría de material de poliuretano de alta-resistencia e incrustadas con capas de reforzo de fibra para mellorar a resistencia á tracción); Componentes de conexión e guía (rodamentos de articulación, estruturas de límite, garantía de dirección de transmisión estable, adaptación á traxectoria de movemento das extremidades do robot) O deseño xeral enfatiza o peso lixeiro, a miúdo empregando cadros de aliaxe de aluminio ou fibra de carbono para reducir a carga do robot.
Aquí presentamos os actuadores accionados por correa estándar da UE, TMEB65, con datos para ti como segue:
Podes ver máis proxectos ou visitar a nosa galería de vídeos en Youtube: https://www.youtube.com/@tallmanrobotics
|
Modelo Non |
Motor Potencia (W) |
Corpo Anchura (mm) |
Repetibilidade (mm) |
Especificacións da correa de distribución |
Carga máxima (kg) |
Carrera máxima (mm) at velocidade máxima (mm/s) |
Empuje clasificado |
Guía lineal |
|||
|
Ancho (mm) |
Ración de desaceleración |
Chumbo (mm) |
Horizontal |
Vertical |
|||||||
|
TMEB65-CR |
200W |
65 |
±0.1 |
32 |
3:1 |
50 |
4 |
2 |
5500 mm a 2500 mm/S |
59 |
15×12.5-1 |
|
5:1 |
30 |
12 |
5 |
5500 mm a 1500 mm/S |
99 |
||||||
|
7:1 |
21.43 |
25 |
9 |
5500 mm a 1071,5 mm/S |
139 |
||||||
|
10:1 |
15 |
50 |
14 |
5500 mm a 750 mm/S |
199 |
||||||
|
400W |
3:1 |
50 |
12 |
7 |
5500 mm a 2500 mm/S |
159 |
|||||
|
5:1 |
30 |
34 |
15 |
5500 mm a 1500 mm/S |
265 |
||||||
|
7:1 |
21.43 |
65 |
24 |
5500 mm a 1071,5 mm/S |
372 |
||||||
|
10:1 |
15 |
65 |
38 |
5500 mm a 750 mm/S |
531 |
||||||
|
750W |
3:1 |
50 |
23 |
13 |
5500 mm a 2500 mm/S |
300 |
|||||
|
5:1 |
30 |
65 |
28 |
5500 mm a 1500 mm/S |
500 |
||||||
|
7:1 |
21.43 |
65 |
45 |
5500 mm a 1071,5 mm/S |
700 |
||||||
|
10:1 |
15 |
65 |
65 |
5500 mm a 750 mm/S |
1000 |
||||||
|
10:1 |
20 |
76 |
26 |
5500 mm a 1000 mm/S |
398 |
||||||
|
750W |
3:1 |
66.66 |
13 |
8 |
5500 mm a 3333 mm/S |
225 |
|||||
|
5:1 |
40 |
36 |
18 |
5500 mm a 2000 mm/S |
375 |
||||||
|
7:1 |
28.5 |
71 |
30 |
5500 mm a 1425 mm/S |
525 |
||||||
|
10:1 |
20 |
80 |
50 |
5500 mm a 1000 mm/S |
750 |
||||||









Escenario de aplicacióndeUnidade de Actuación de Cinto Robóticocéntrase no control de movemento flexible dos robots:
accionamento conxunto do brazo de robots colaborativos para lograr agarre e montaxe flexibles; As articulacións das pernas ou dos dedos dos robots biónicos (como os brazos robóticos e os robots cuadrúpedos) simulan movementos naturais dos membros; O mecanismo de movemento auxiliar dos robots de rehabilitación médica proporciona unha forza motriz suave e controlable; Módulo conxunto para robots educativos, simplificando a programación complexa de movementos. As súas principais vantaxes residen no ruído de transmisión baixo, a velocidade de resposta rápida (retraso inferior ou igual a 10 ms), a estrutura compacta e a capacidade de acadar varios graos de liberdade de movemento nun espazo limitado. O custo de mantemento é inferior ao da transmisión de engrenaxes, polo que é adecuada para escenarios con altos requisitos de flexibilidade e seguridade na interacción humana-máquina.
A Unidade de Actuación de Cinto Robótico equilibra perfectamente os requisitos de precisión e seguridade de movemento a través do concepto de deseño de "combinación de rixidez e flexibilidade", e as súas características modulares reducen significativamente o limiar para o desenvolvemento do robot. Coa expansión dos escenarios de integración humana-máquina, esta tecnoloxía converterase na opción principal para articulacións de robots lixeiros.
Etiquetas en quente: Unidade de accionamento do cinto robótico, fabricantes de unidades de accionamento do cinto robótico de China, provedores, fábrica


